Motivated by the Japanese paper folding technique origami, researchers have created shape-shifting ‘Transformer’ robots.
A team at North Carolina State (NC State) University’s method enables just three active motors to change a single plastic cubed structure into over 1,000 different shapes.
Engineers believe the discoveries may result in the creation of artificial systems that can change shape and bear loads, such as adaptable robotic structures for use in space.
“Here we use a hierarchical concept observed in nature – like layered muscle fibers – but with plastic cubes to create a transforming robot,” said Jie Yin, associate professor of mechanical and aerospace engineering at NC State and co-corresponding author of the study, in a statement .
For biological and artificial systems to be multifunctional and allow for adaptability to a variety of contexts, they must possess versatile shape-morphing capabilities. The mimic octopus, for example, is able to quickly transform into a variety of shapes.
Strategies such as beams, origami structures, and reconfigurable robotics allow for shape-morphing in artificial systems, but they are not without difficulties, including complicated actuation and limited utility.
According to researchers, despite significant breakthroughs, artificial systems have yet to match the diversity and efficiency of their biological counterparts; the key to shaping versatility is mobility and degrees of freedom (DOF).
Shape modification is restricted in conventional stiff origami structures due to their single degree of freedom (DOF). The team highlights that modular origami metastructures, which need intricate actuation systems yet allow higher mobility due to their polyhedron-shaped modules, are an example of recent advancements.
The group suggested a hierarchical architecture of spatial closed-loop processes as a solution to these problems. By substituting flexible, multi-level structures for inflexible connections, these systems allow for a wide range of reconfigurable megastructures with infinite design options that strike a balance between actuation efficiency and variety.
Versatile shape-shifting robots
The project aimed to achieve a variety of versatile shapes using the fewest number of actuators to power the shapeshifting.
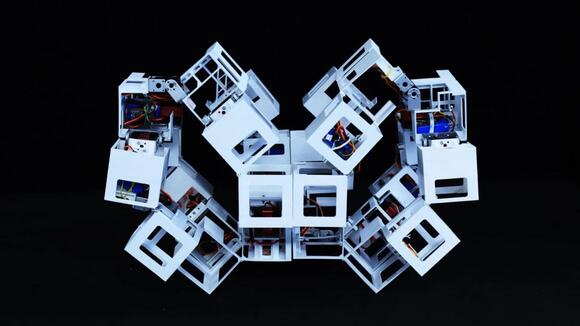
Using a 3D printer, the NC State researchers assembled 36 hollow plastic cubes with spinning hinges. Some hinges were secured with metal pins, while others were turned on wirelessly by a motor.
With just three active motors , the researchers were able to reposition the cubes into over 1,000 different configurations. These shapes comprised multistory buildings, bridge-like structures, and tunnel-like structures.
The untethered transformer bots need only manipulate how the structure’s shape changes to move forward, backward, and sideways without the need for feet.
According to the team, the bots may also change shape quite quickly, going from being flat or totally open to being a larger cube that resembles a box or is fully closed. Additionally, the bots are capable of lifting three times their own weight.
Subsequently, the researchers aim to further enhance the transformer bots. The goal now is to create a more robust structure capable of bearing larger loads.
“We think these can be used as deployable, configurable space robots and habitats. It’s modular, so you can send it to space flat and assemble it as a shelter or as a habitat, and then disassemble it,” said Antonio Di Lallo, an NC State postdoctoral researcher and co-first author of the paper.
The details of the team’s research were published in the journal Nature .
 Most Popular
Most Popular
Comments / 0